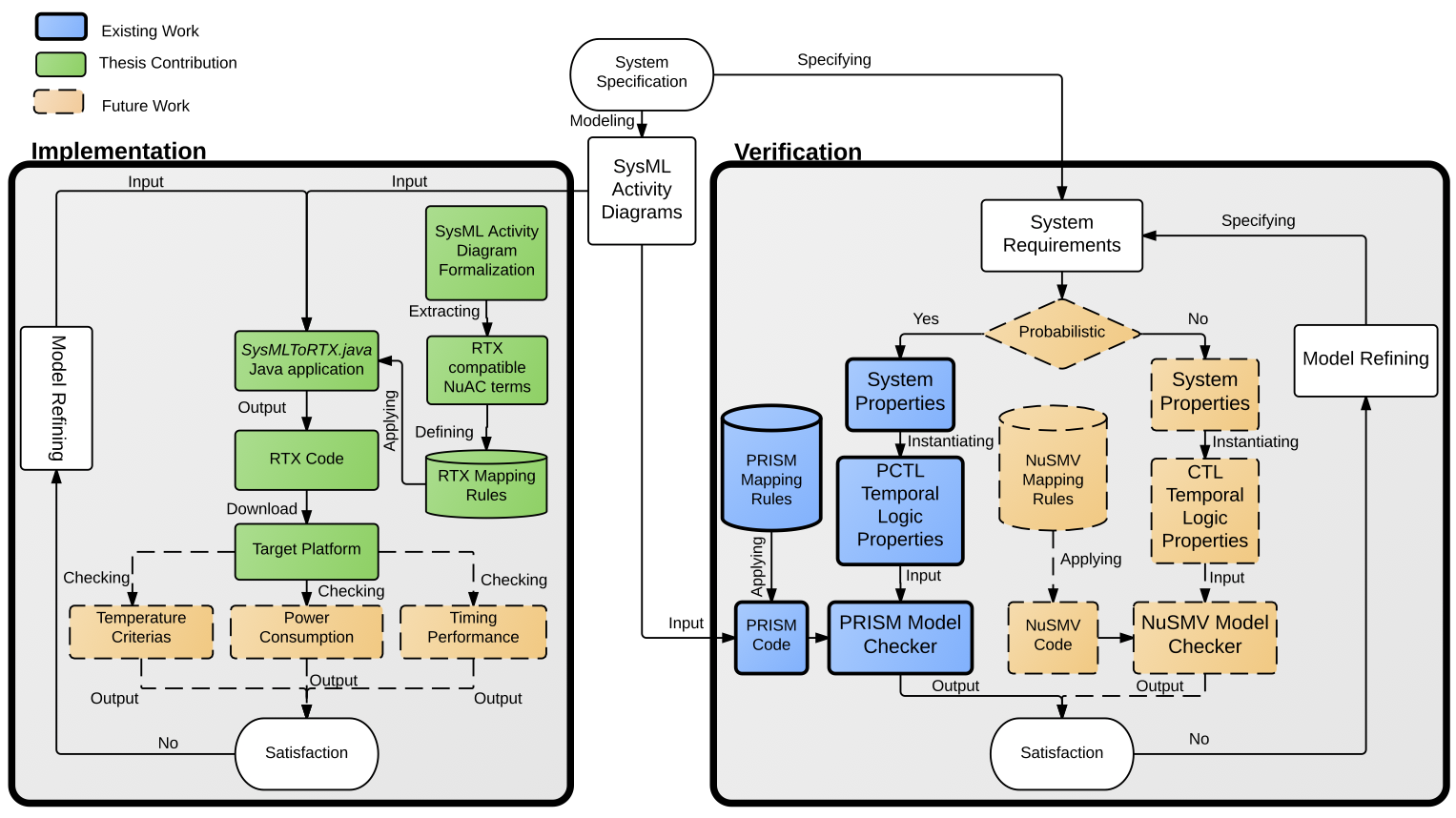
Previously in our group, we formalized SysML activity diagrams by developing a calculus called New Activity Calculus (NuAC). In this work, we redefined NuAC terms to support RTX (Keil Real-Time Operating System) and present an automated SysML/UML activity diagram to RTX code generator, using mapping rules expressed in NuAC. To achieve this goal, we proposed a set of rules that were used for mapping a SysML/ UML activity diagram into a suitable code to be executed on ARM CortexM processor family. To automate the process of code generation, we developed a JAVA application that uses the proposed rules to automatically generate the RTX code from the input activity diagram model.
 |